PROJECT OVERVIEW
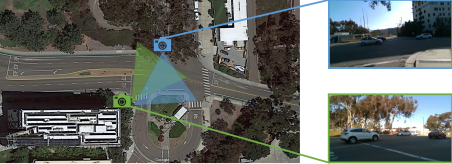
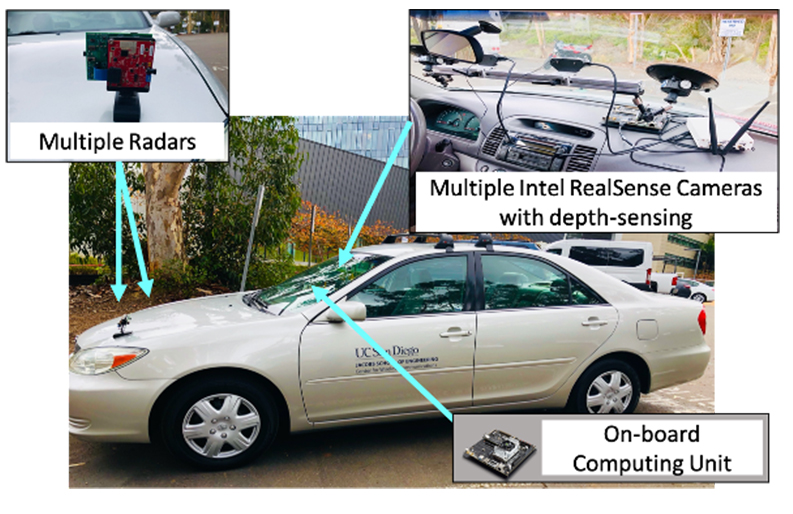
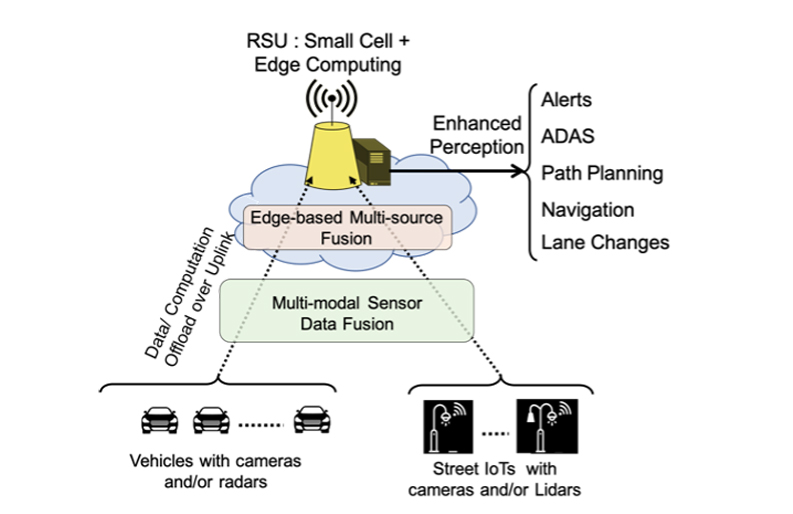
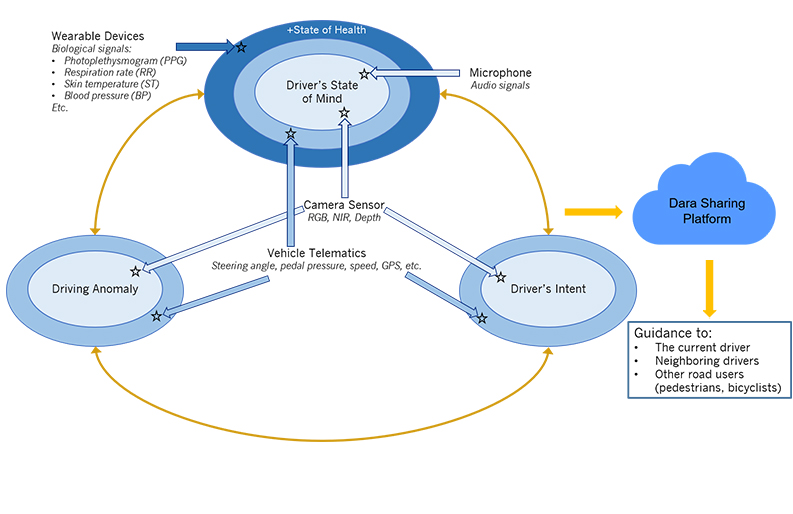
We envision the need for a novel and completely collaborative approach for safer, more efficient and eco-friendly commutes in addition to current day V2V propositions. Real-time streaming data from multiple participants - vehicles, pedestrians and smart street IoTs (like smart traffic lights and pedestrian crossings) - when aggregated, fused and analyzed can provide an accurate, complete and dynamic street situational awareness to all the street participants, leading to collaborative and personalized guidance and advanced warnings services. As part of this project we are developing algorithms to accurately fuse data from multiple sources as well as determine the state of mind and intent of drivers inside vehicles. To enable this collaborative platform, we are developing reliable mmWave V2X communications techniques and enhanced edge computing resource allocation algorithms. Underlying all of our research is a vehicular and roadway testbed that supports data collection and validation of the developed techniques both on the UCSD campus and deployed alongside our city partners in the future.